Session at World Conference on Quality and Improvement (WCQI) presents practical steps for evaluating and implementing QC automation
New Scale Robotics CEO David Henderson presents a conference session at the ASQ World Conference on Quality and Improvement (WCQI) May 24-28. The talk, entitled From Manual Gages to Robotic Calipers: Who, Why and How, is available on demand to conference attendees.
David will be available for questions in the Meet the Speakers Lounge from 1 to 2 pm CT on Weds., May 26 and Thurs., May 27. Attendees can also visit the New Scale Robotics conference exhibit booth to chat with technical sales staff, view videos, or sign up for a live demo.
About the conference session
The session celebrates the WCQI conference theme of “Quality: Past, Present and Future.”
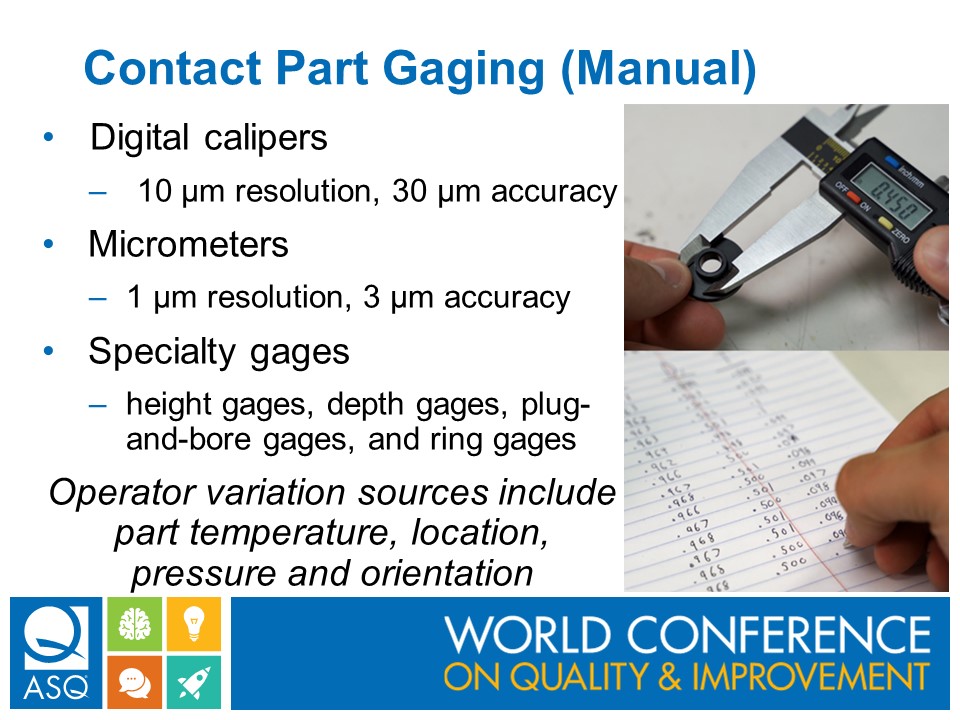
It explores the evolution of small-part measurement from manual gages and tools, to “smart” gages, and now collaborative robots with digital calipers, grippers for part handling, and automatic electronic data capture. You will learn:
WHO can benefit from these innovations
Many high-mix, small-batch manufacturers are using manual digital calipers for QC measurements. This is boring and repetitive, lacks repeatability, and often involves error-prone manual data entry. In addition, many manufacturers use CMM would like to reduce the bottleneck at this machine.
WHY quality teams should consider robotic systems
See how robotic caliper systems yield higher throughput, productivity and quality using several case studies:
A collaborative robot with a combination robotic gripper/caliper performs machine-tending of a CMM, with the added feature of taking preliminary measurements of each part to decide whether a part should be loaded. The robot measures several dimensions on each part and rejects any that are out of spec, rather than loading them into the CMM. This prevents wasted CMM cycles and reduces the CMM bottleneck. The robot then unloads the CMM and automatically sorts parts into pass/fail trays based on the CMM results.
A precision machine shop uses real-time data from a robotic caliper to alert operators to process drift and tool wear.
A QC lab uses a collaborative robot to automate its required, 100% final inspection of medical components. The robotic system picks parts, measures multiple dimensions on each, records the data to a PC, and places the parts into output trays sorted by tolerance ranges.
HOW QC teams can get started
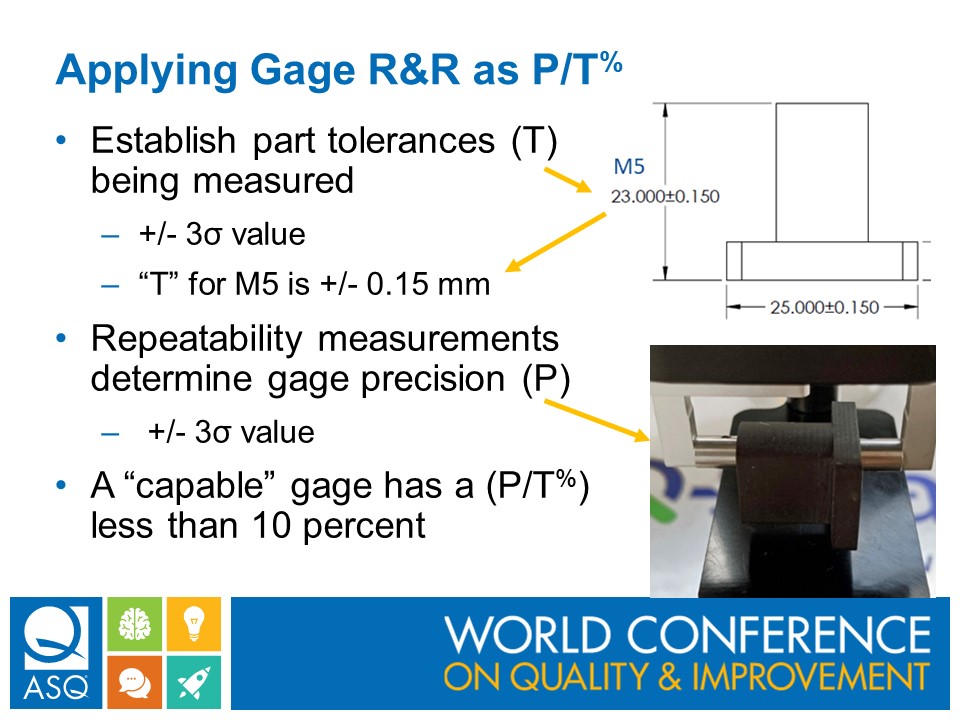
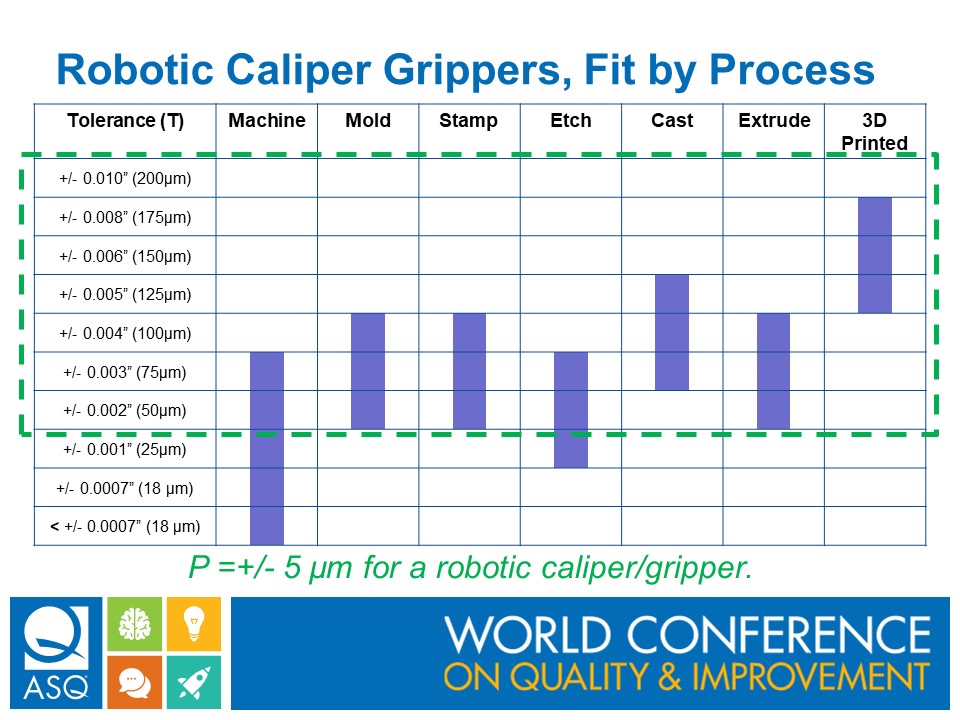
Learn what types of parts are good candidates for robotic measurement systems, how to calculate gage R&R, how to qualify tool capability for a robotic caliper system, and what new skill sets are required to deploy and program collaborative robots for automated small-part measurement.
Like their counterparts in production, collaborative robots in QC automate dull and repetitive work, keep humans safe from injury, and deliver more consistent performance. They improve measurement repeatability and reproducibility as well. With these innovations, collaborative robots give manufacturers a new competitive advantage in the race to maintain high quality and reduce costs.
Participants will walk away with:
- A checklist for determining whether their parts and measurement processes can be automated using collaborative robots and robotic calipers.
- Formulas and considerations for calculating gage R&R and qualifying the robotic measurement system, including real examples.
- Formulas for estimating return on investment (ROI) – both at the current level of volume, and at a higher volume should they wish to take advantage of the potential to increase throughput without adding head count by using robotics.
- Tools to calculate the reduction in CMM bottleneck by adding robotic machine tending with preliminary robotic caliper measurements.
- An understanding of the skill set required to deploy and program collaborative robots, which require no prior experience with robotics.

New Scale Robotics Session Presentation
excerpts
Can’t attend the conference? Contact us for a copy of the presentation.