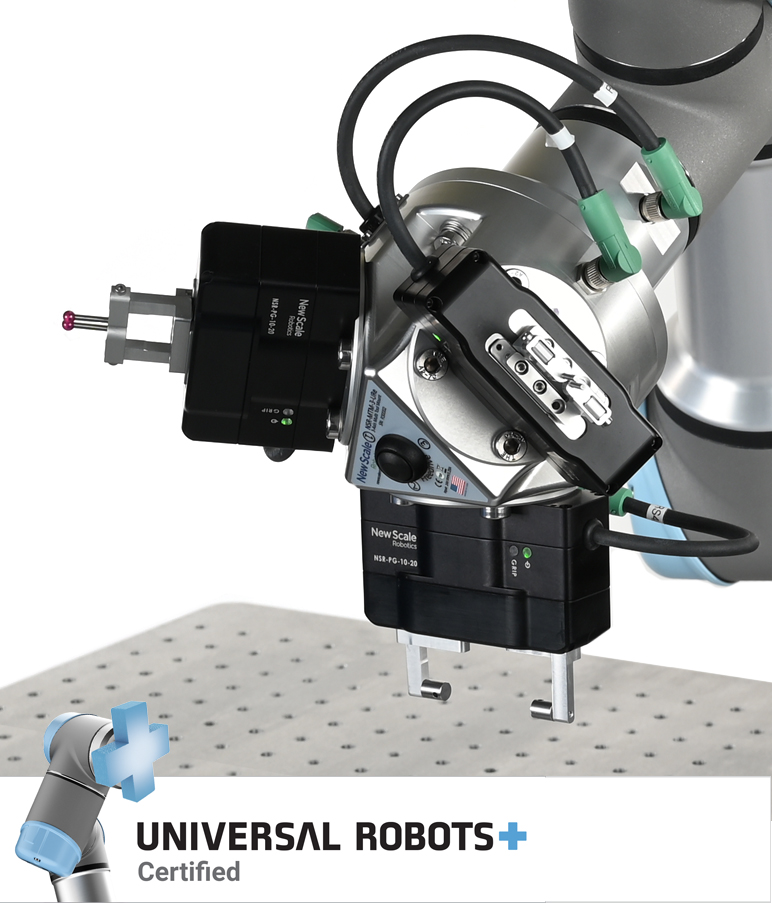
NSR-PG Precision Gripper / Robotic Caliper
This dual-function robotic gripper for part handling and robotic caliper for measuring is included in Q-Span Workstations for automated QC inspection and sorting of small parts.
for automated small part measurement inspection
Precise finger motion with force control
for gripping and intricate small part handling
Small and lightweight design
enables multiple tools on a single robot arm
Quick connect to UR tool port or New Scale MTM Multi-Tool Mount
– no cables along the robot arm, for continuous 360-degree rotation
See Specifications
Specifications
NSR-PG-10-20-URe Specifications (with default factory fingers)
| Robot Compatibility | Universal Robots UR3e, UR5e, UR10e | |
| Interface | High-speed RS-485 interface for highest measurement precision and ability to use multiple grippers/calipers on one robot. | |
| MOTION PRECISION | ||
| Measurement resolution | 2.5 μm | 0.0001 in |
| Measurement repeatability1 | +/- 5 μm | +/- 0.0002 in |
| Measurement accuracy, full scale2 | +/- 20 μm | +/- 0.0008 in |
| MOTION RANGE | ||
| Adjustment range of standard fingers3 | 0-52 mm | 0-2.0 in |
| Travel – gripper opening range | 20 mm | 0.8 in |
| SPEED AND FORCE | ||
| Speed – programmable) | 2-30 mm/s | 0.1-1.2 in/s |
| Grip force – programmable, bi-directional4 | 3-10 N | 0.7- 2.2 lb force |
| Grip force resolution | 0.5 N | 0.1 lb force |
| Back drive force – no power | 1-3 N | 0.2-0.7 lb force |
| Recommended work piece mass5 | 100 grams | 0.22 lbs |
| MECHANICAL | ||
| Lifetime (minimum) | 500,000 | cycles |
| Mass – gripper with standard fingers, UR mounting plate and hardware | 205 grams | 0.45 lb |
| IP rating | 40 | |
| Agency approvals | CE, RoHS | |
NOTE 1 – Applies to measurements taken using the same grip force for each part.
NOTE 2 – Applies to measurements taken using the same grip force for each part and also using the same grip force to establish the reference offset.
NOTE 3 – Fingers can be re-positioned by loosening two screws and using mounting pin locations. Custom fingers can be installed for wider adjustment range.
NOTE 4 – Gripping force is bi-directional; parts may be gripped on their inside or outside surfaces using appropriate fingers.
NOTE 5 – Maximum may be higher depending on finger friction and force setting.
CLOSE SPECIFICATIONS

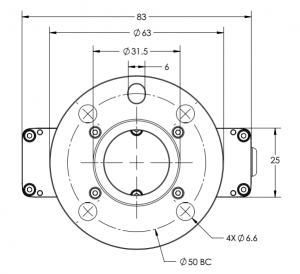
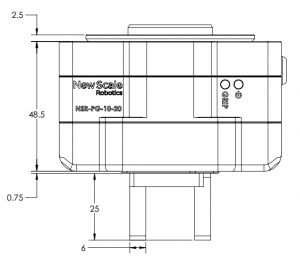
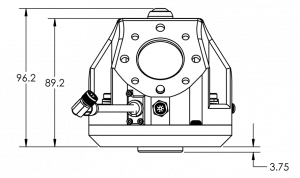
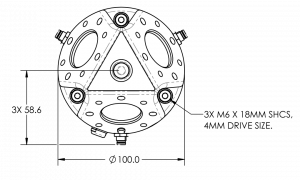
NSR-MTM Multi-Tool Mount
This innovative mount supports up to three NSR-PG gripper/calipers on one Universal Robots or FANUC CRX cobot in Q-Span Workstations for automated QC inspection and sorting of small parts.
ISO 9409-1-50-4-M6 mounting surface and M8 round plug cable connection
Freedrive button
Quickly teach and set positions
Automatically build device processes
Speed and simplify creation of complex operations
See Specifications
Specifications
NSR-MTM-3-URe Specifications (not including tools)
| Mass – with UR mounting plate and hardware | 470 grams | 1.04 lbs |
| Current Draw @ 24 V (NSR-MTM-3 only) Consult tool documentation for current draw of specific tools |
0 to 0.4 Amps | |
| Operating Voltage | 22-26 Volts | |
| Temperature – Operating | 0 to 50 °C | 0 to 122 °F |
| Temperature – Storage | -30 to 60 °C | -22 to 140 °F |
| Humidity – Operating, Non-Condensing | 5 to 95 % | |
| IP rating | 40 IP | |
| Agency approvals | pending | |
| Tool Compatibility | NSR-PG Gripper/Calipers | |
| UR Robot Compatibility | e-Series UR3e, UR5e, UR10e | |
CLOSE SPECIFICATIONS
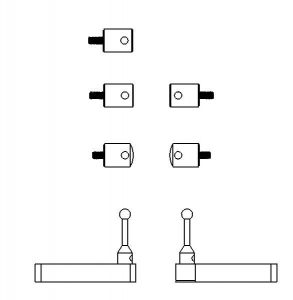
Metrology Fingers and Fingertips Set
Standard gripping fingers, ruby styli fingers, and metrology fingertips for a wide range of measurement needs are included in Q-Span Workstations for automated QC inspection and sorting of small parts.
Using a simple hex key
Measure outside or inside dimensions
Using bi-directional force of the NSR-PG gripper/caliper
See Specifications
Specifications
NSR-SET-F2 Components
| Fingertips | Used to measure these types of features | Example |
| Flat Fingertips (2) | Flat Convex Spherical Convex Cylindrical |
Diameter of a sphere |
| Spherical Fingertips (2) | Flat Concave Spherical Concave Cylindrical |
Distance between two flat surfaces |
| Ruby Styli Fingers (2) | Flat Concave Cylindrical |
Inside diameter of a hole in a part |
| Other Components | ||
| M2x4 screws (6), alignment pins (4) and hex key wrench to install fingers and fingertips | ||
CLOSE SPECIFICATIONS

Q-Span Gauging Systems
Learn more about Q-Span Gauging Systems, flexible do-it-yourself (DIY) automation for small part measurement.
Book a Demo
Schedule a live or virtual demo of the Q-Span Gauging System with one of our applications engineers.
Ask us Anything
Questions about automation or gauging? Just ask!